在运动控制方面,反馈设备是系统中最重要的元素之一。如果没有反馈装置,电机将在开环中运行,无法可靠地定位负载,甚至根本无法移动。我们平时遇到最常见的反馈设备类型是伺服电机编码器或旋转变压器。虽然旋转变压器是非常强大的设备,但它们在当今的伺服电机上并不多见,因此我们将重点讨论伺服电机编码器。
简化伺服电机编码器
在机械的运动控制中,伺服电机编码器是将机械运动转化为电信号的机电设备。输出信号可以是一系列脉冲、模拟(又称正余弦)信号、数字信号,也可以是转换为通信总线的信号。信号被发送到伺服驱动器,伺服驱动器将该信号转换为位置和速度值。今天我们将特别关注安装在电机上的编码器,因此我们的讨论将不涉及带有通信总线的编码器。对于安装在电机上的编码器,需要做出的主要决定围绕着编码器是增量式还是绝对值的。

伺服电机编码器的类型
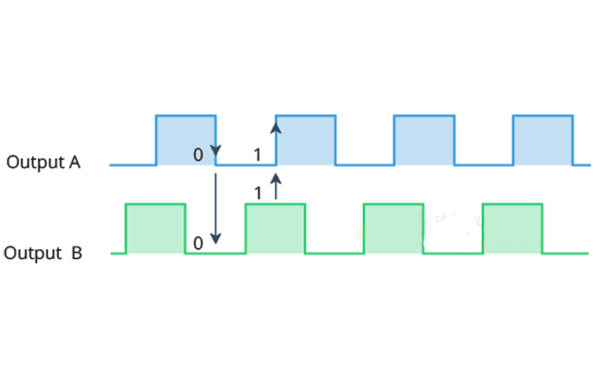
增量编码器依靠驱动器根据编码器发送到驱动器的输出脉冲来解释位置。增量编码器的输出通常是两个方波(A 和 B),然后用于确定旋转方向。该信号有时与每转 (Z) 一次出现的索引脉冲组合。然后将两个方波组合起来会给你一个“正交”信号。
另一种常见类型的增量编码器称为正余弦 (Sin/Cos)。两者之间的主要区别在于,正弦余弦编码器在 A 和 B 通道上以 1 伏峰峰值 (1 Vpp) 模拟正弦波的形式发送信号。由于正弦/余弦编码器的连续波信号,它们可以实现更高的分辨率。

两种类型的增量编码器都可以使用 X4 编码将反馈设备的分辨率提高四倍。对于正弦/余弦编码器,这是通过计算信号在给定周期内穿过 0V 的次数来完成的。对于方波编码器,它们计算每个周期的两个方波的上升沿和下降沿。
这些伺服电机编码器的主要缺点是伺服系统在断电时会丢失其位置信息。这意味着系统需要在上电时再次找到它的位置。至少,这将导致机器的启动时间更长,但在最坏的情况下,由于工具设计,归位可能无法实现。为了解决这个问题,许多工程师开始使用绝对值编码器。
伺服电机编码器保持位置信息
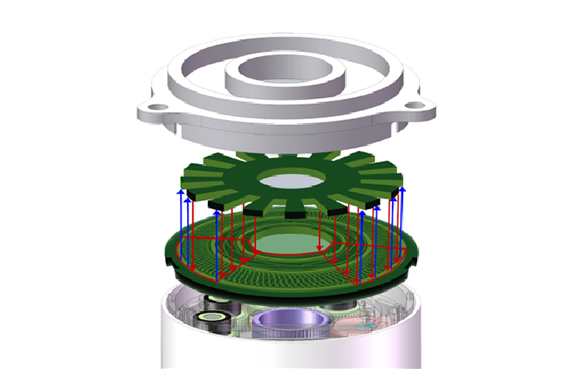
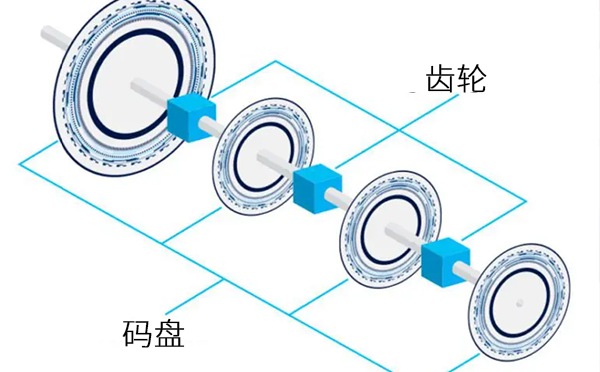
当系统断电时,绝对值编码器会保持位置信息。这使系统可以立即知道其位置并开始上电工作。绝对值编码器将使用编码轮,允许每个编码器位置读取唯一值。因为每个位置都有一个唯一的值,如果在断电的情况下转动电机,当电源恢复时电机会知道它的新位置。

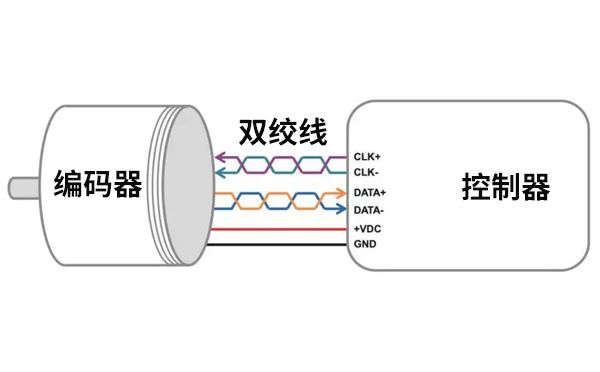
伺服电机编码器驱动通信
为了与驱动器通信,绝对值编码器将发送原始编码器脉冲或使用通信接口。这些接口将发送与时钟信号同步的绝对位置。为了改进这些设计,一些电机现在配备了一个 DSL 编码器,该编码器仅使用两条线与伺服驱动器通信。这种数字通信允许反馈信号在与电机电源相同的电缆中运行,并允许与电机编码器和驱动器进行更多的双向通信。