许多小型电机应用,如机器人、工业设备和消费产品,都采用数字增量编码器进行反馈传感。因此,编码器选择是系统设计过程的重要组成部分。为工作选择最佳编码器需要了解最重要的编码器属性以及应用程序的控制要求。
什么是典型要求?
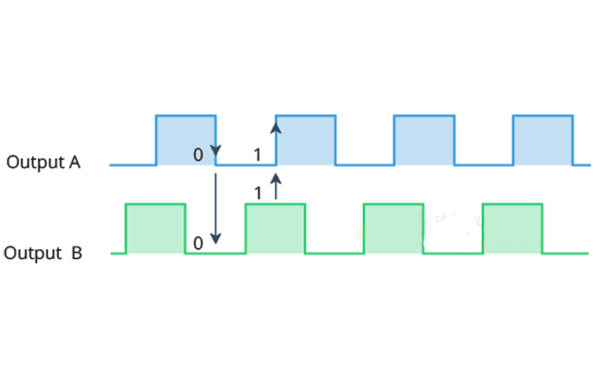
图 1. 数字增量编码器的信号。对状态变化(通道 A 和 B 的信号边沿)进行计数的结果是分辨率是一个编码器通道上每转计数的四倍。
每个应用程序都不同;例如,主要任务可能是位置控制或速度控制。速度或位置控制的精度水平可能大不相同,应在选择编码器之前进行定义。低速(低于 100 RPM)的速度控制需要比高速(1,000 RPM 及以上)的速度控制更好的反馈。
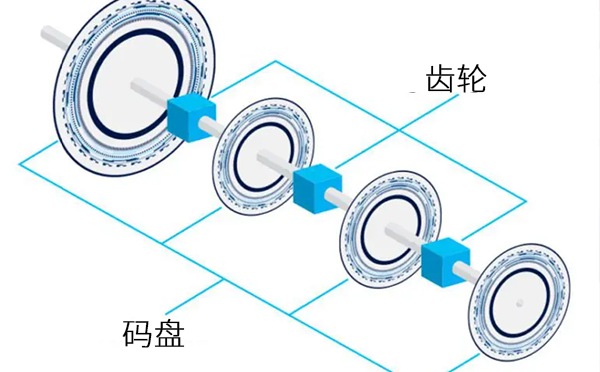
负载可以直接耦合到电机上,也可以有机械转换系统,例如齿轮箱或螺钉。编码器通常安装在电机轴上,但也可以安装在负载本身上。转换机构的机械特性会影响编码器的选择,因为必须考虑齿轮减速和机械间隙。
温度、振动和电磁干扰等环境条件也可能对编码器的选择产生影响。例如,光学编码器应该防尘。磁性编码器可能对外部磁场(包括电机的磁场)敏感,并且可能需要屏蔽。
增量编码器的关键特性是什么?
增量式编码器的特征参数是电机每转的矩形脉冲数。通常,有两个通道提供相同的脉冲数。这两个信号具有四分之一脉冲长度的相对相移。这种布置允许检测电机旋转方向,并为每个脉冲提供四种不同的状态。有时,这些状态称为四元计数。它们代表实际分辨率,比一个通道上的脉冲数高四倍(图 1)。具有 1,000 CPT(每圈计数或脉冲)的编码器每圈可提供 4,000 个状态,或标称分辨率为 360°/4000 = 0.09°。
图 2. 具有 256 CPT 的磁性内插编码器的非线性测量示例。与完美位置的偏差显示为编码器信号(1,024 个四元数)的函数。
编码器分辨率范围很广,从可简单用于检测运动的非常简单的 1 CPT(或 4 个状态)编码器到用于高精度位置或速度反馈的数个 10,000 CPT。影响分辨率的因素有很多,包括基本物理原理(光学、磁性、电感)、主要信号类型(模拟或数字)、信号处理(例如插值)和机械布局。
编码器的准确度怎么样?
分辨率——状态数——给出标称精度;该位置在一个状态的误差范围内是已知的。但是,编码器脉冲长度可能会因机械公差(例如轴跳动和磁极长度)而有所不同。电机旋转一个范围内的脉冲可能比其他范围内的脉冲短。因此,测量位置在电机旋转一圈内以周期性方式偏离实际位置(图 2)。
最大偏差(峰到峰)称为积分非线性 (INL)。INL 在需要绝对位置精度的应用中很重要。可重复性不受 INL 影响,而是一个信号抖动问题,通常等于不到一种状态。
增量编码器和绝对位置
增量编码器提供位置变化。对于绝对定位,必须首先建立参考或起始位置。这是通过将机构移动到外部参考点来实现的,外部参考点可以是机械限位器或限位开关。
图 3. 通过额外移动到索引通道信号的边缘来提高参考位置的精度。
一些编码器具有每圈一个脉冲的第三个通道。该索引通道的边缘提供了一圈内的绝对位置参考(图 3)。外部参考的有限精度可以通过额外移动到索引通道边缘之一来提高。但是,索引通道不是定位的先决条件。事实上,机器制造商尽量避免使用索引作为参考,因为如果必须更换电机编码器单元,则需要重新校准。此外,一些控制器使用索引通道来交叉检查编码器信号并监控每圈的编码器计数。
传输信号时要注意什么
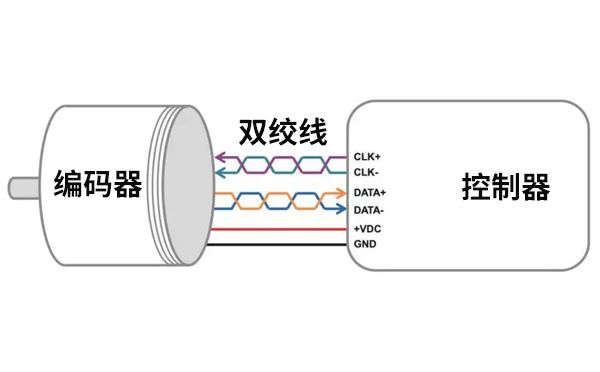
建议线路驱动器用于长线路传输和更好的信号质量。对于定位,线路驱动器对于避免丢失编码器脉冲很重要。
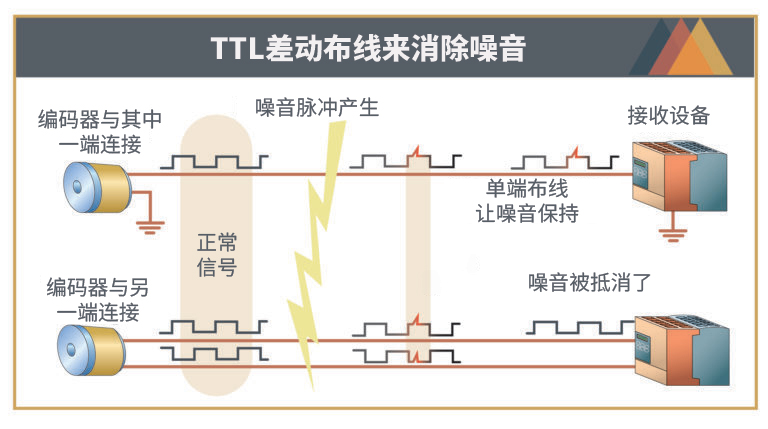
线路驱动器为每个通道(A、B、I)生成反相信号(A、B、I)。每个信号对一起传输并评估差异,从而滤除信号传输过程中的任何电磁干扰。作为一个有益的副作用,信号质量得到改善,信号边缘更清晰,并且驱动器功能可以使信号传输更远的距离(最多约 30 m)。
编码器需要最低电源电压。在长编码器线路上,线路电阻和相应的电压降可能是一个问题。这就是为什么检查电缆横截面和电源电压很重要的原因。
环境条件和稳健性
编码器的标准工作温度范围为 –30 °C 至 +100 °C。这涵盖了大多数应用和电机产生的热量。在具有强烈振动和机械冲击的应用中,坚固的机械外壳和良好的电缆应变消除非常重要。
虽然光学编码器对电磁干扰不太敏感,但磁性编码器需要良好的屏蔽杂散磁场。如果外壳密封不严,光学编码器对灰尘很敏感。
位置和速度控制
在为定位和速度控制应用选择编码器时,可以使用以下基本规则:
规则 1:定位编码器 — 一个好的建议是选择脉冲数高于 360° 除以所需角位置精度的编码器;换句话说,一些州的数量要高出四到十倍。定位时,请选择带线路驱动器(差分信号)的编码器。
规则 2:用于高精度定位的编码器 — 选择带有线性驱动器的光学编码器以实现高精度定位。与内插磁编码器相比,它们具有更高的分辨率、更少的抖动和更低的 INL。
规则 3:用于机械定位的编码器 - 选择带有线驱动器和中等或低状态数的磁性编码器。机械减少将增加分辨率。由于机械作用,系统将无法从高精度光学编码器中受益。
规则 4:高速控制编码器 (> 500 RPM) — 选择具有中等或少量状态和足够高的最大额定速度的编码器。通常不需要高精度光学编码器。对于大多数应用程序通常足够的一个好的经验法则是(RPM 中的速度)×(CPT 中的编码器分辨率)> 100,000。
规则 5:低速控制编码器 (< 100 RPM) — 选择具有大量或非常多状态的编码器并结合快速控制器。