在电气传动系统中,编码器用于测量电机转速和转子位置的核心部件。光电编码器,其旋转轴与被测量的旋转轴连接,由被测量的旋转轴驱动,然后将被测量的物理量转换为二进制编码或一串脉冲。
对于光电编码器,有三种类型:增量编码器、绝对值编码器和混合编码器。增量编码器主要用于转轴速度测量,绝对编码器主要用于测量转轴空间位置,而混合编码器实际上是增量编码器和绝对编码器的组合,后端是处理芯片。因此,事实上,这三种编码器都具有测量转子速度和空间位置的功能。
编码器如何实现物理量的测量?这要从其原理出发。所以说增量式编码器的工作原理。

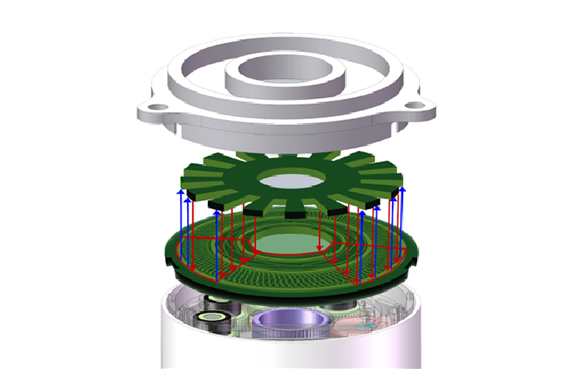
被测量的旋转轴驱动其旋转轴旋转,从而使光电码盘旋转。关键部分是光电码盘,周围刻有等距辐射窄缝,是两组透明检测窄缝。这两组透明检测窄缝错开1/4间距,因此两个光电变换器的输出信号在相位上相差90度。工作时,向盘不动,只有主码盘及其旋转轴与测量旋转轴一起旋转,使发出的光源投射到主码盘和向盘上。
如果主码盘的不透明区域与方向盘的透明窄缝对齐,则投影光完全被阻挡。此时,编码器输出的电压信号最小。如果主码盘的透明区域与方向盘的透明窄缝对齐,则投影光完全通过。此时,编码器输出的电压信号最大。
因此,每次增量编码器的主编码盘转动刻度线周期时,输出近似正弦波电压信号,两组光电转换器的输出电压信号相差为90度。
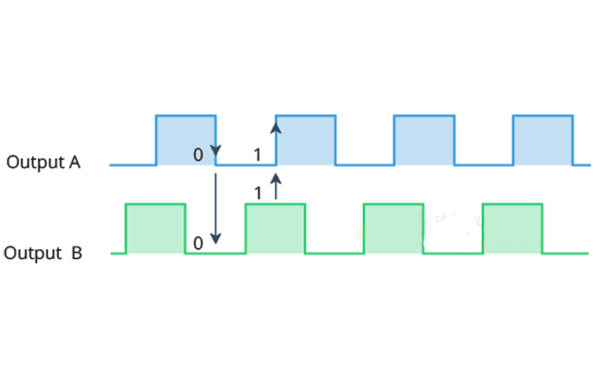
看下图,是增量编码器输出波形
")
上面不是说有两组光电转换器输出信号吗?图中的A和AB
它是输出的两组电压信号,属于两个正交脉冲。图中的Z是一个零脉冲,用于校正每个旋转编码器产生的脉冲数量,并在每个旋转范围内控制误差,以避免累积误差。
根据A和A区分电机转子的旋转方向B这两个脉冲信号相位判断电机转子是正的还是反的。然而,增量编码器既有优点也有缺点。其优点是易于小型化,结构简单,响应速度快。缺点是断电后容易丢失数据和积累误差。
综上所述,增量式编码器可用于检测电机转子转速和转子初始位置。
比如速度测量;根据电机转速表达式n=60•m/T•N可以看出,只要知道光电码盘每转输出脉冲数N就可以知道电机转子转速。
艾迪科编码器厂家,20年编码器生产研发经验,是集编码器研发、生产、销售与一体的“专、精、特、新”中小企业,公司目前供应:绝对值编码器、旋转编码器、光电编码器、增量编码器、以太网编码器、刀架编码器、齿轮感应式编码器、中空编码器、伺服电机编码器和拉线编码器。欢迎广大客户致电400客服专线:400-0631-226,洽谈合作。